Research
Hanyang University. Human-Computer Interaction Lab
Current Research
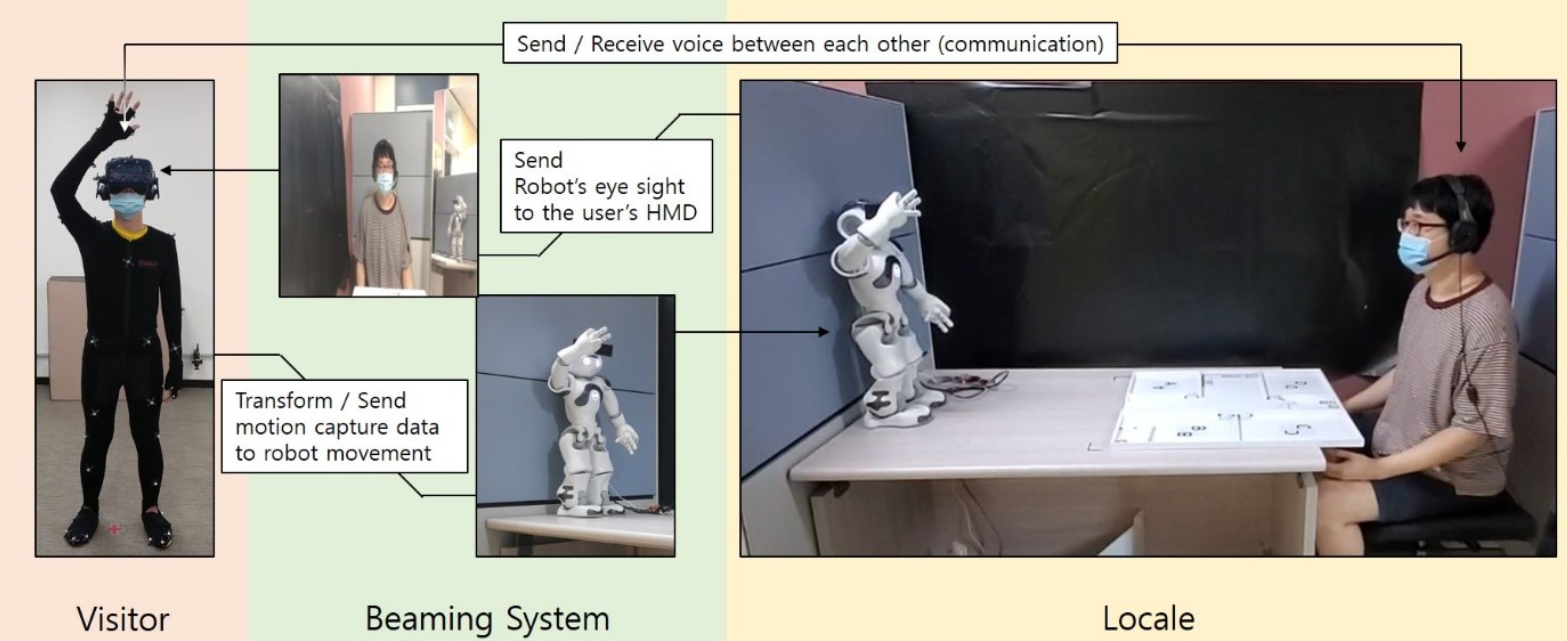
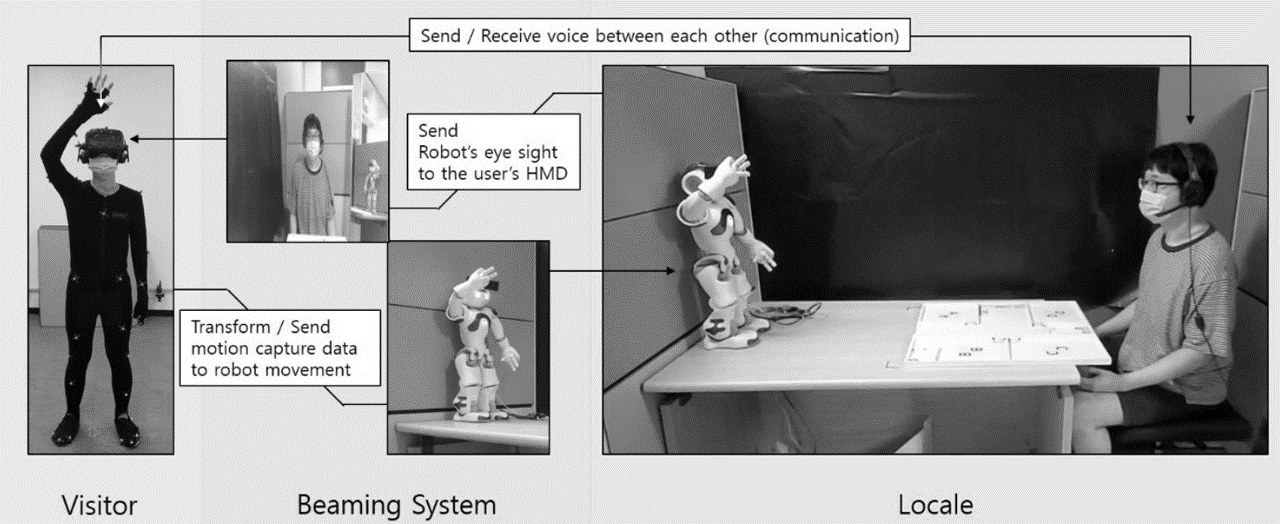
Research on Body Ownership Illusion Toward Humanoid Robot
Research on Human-AI interaction
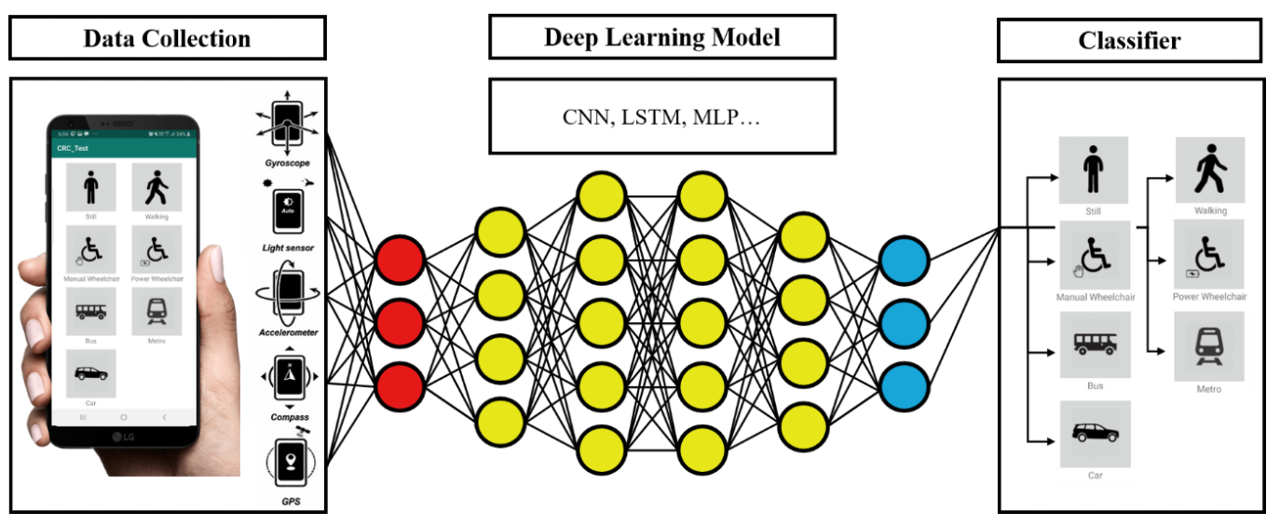
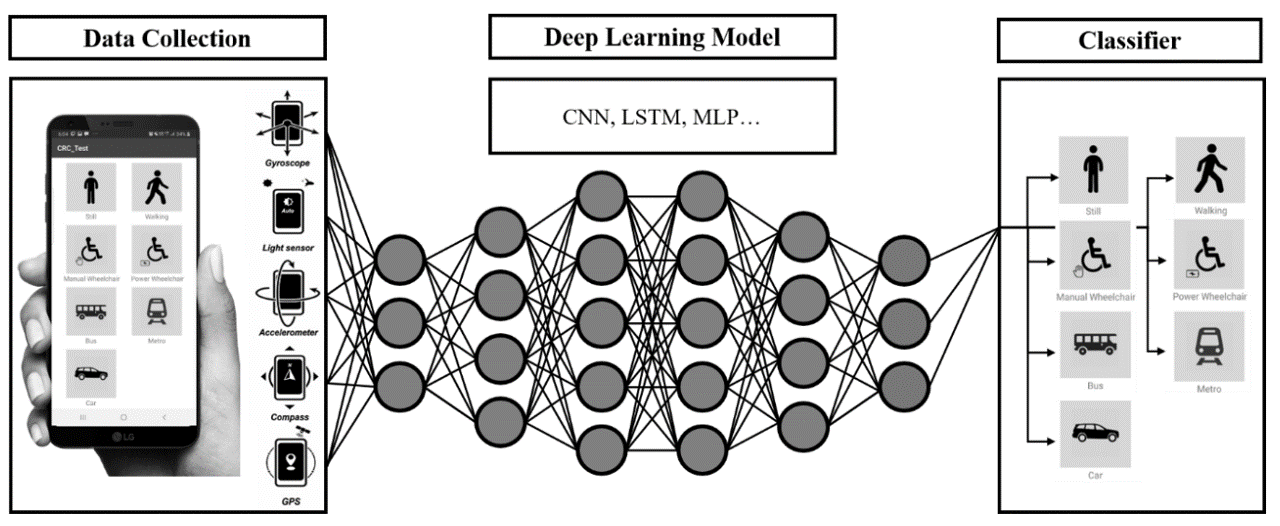
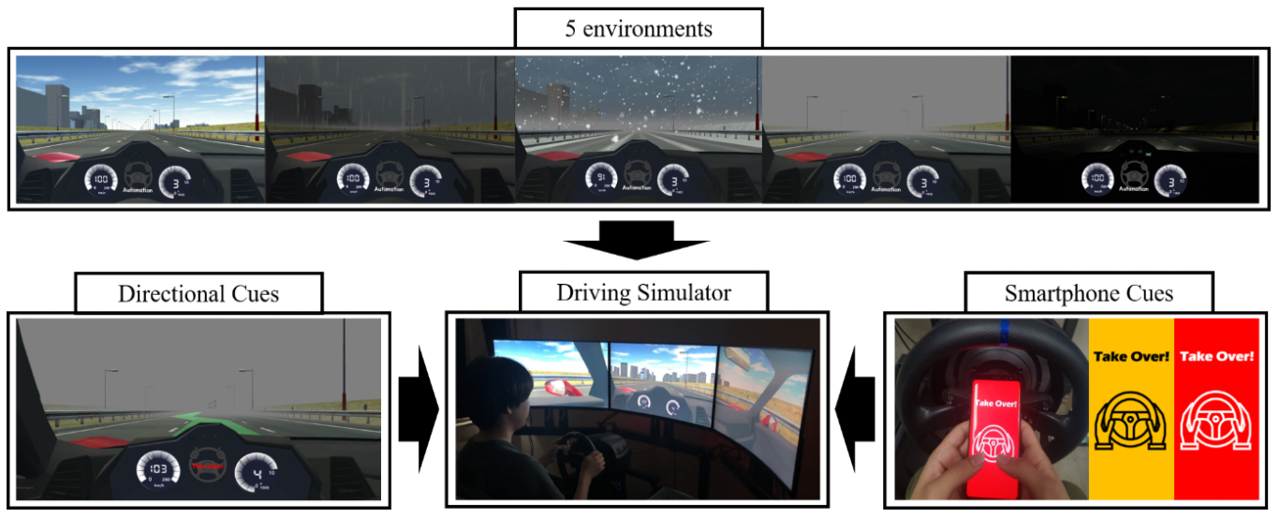
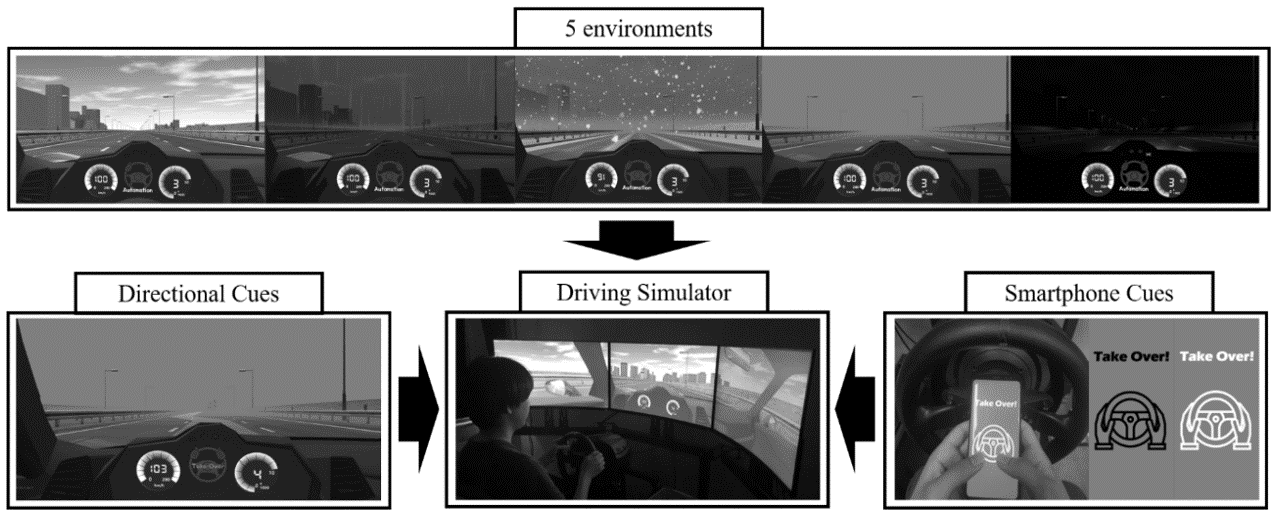
Research on Human-Vehicle Interaction
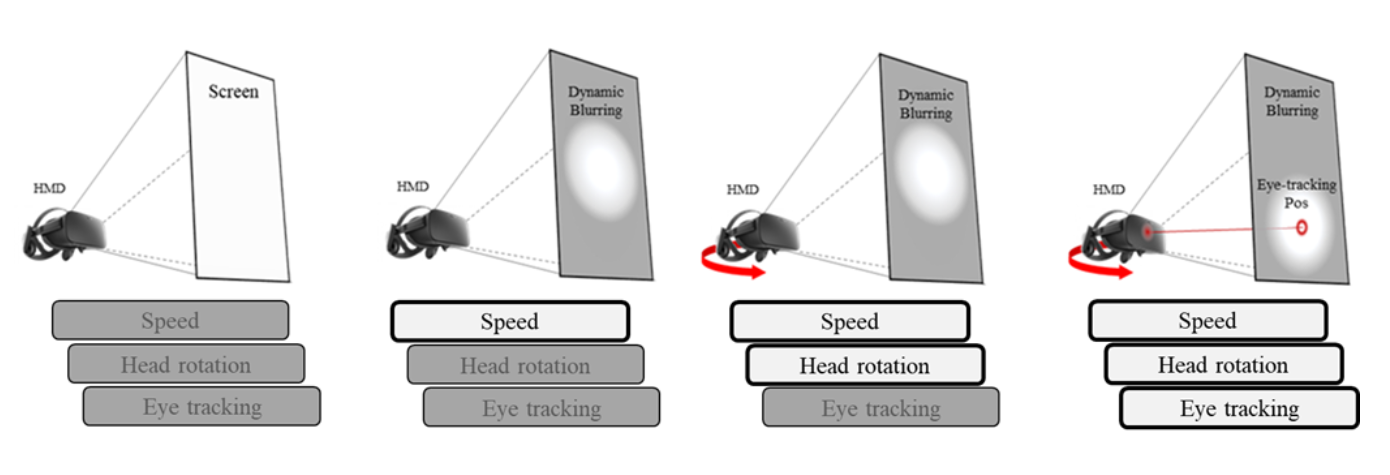
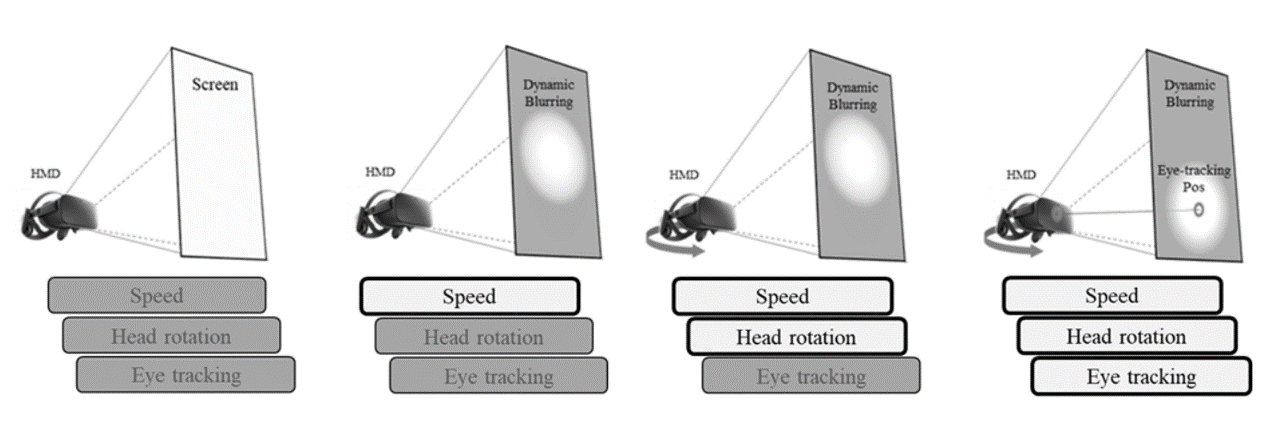
Research on VR Sickness
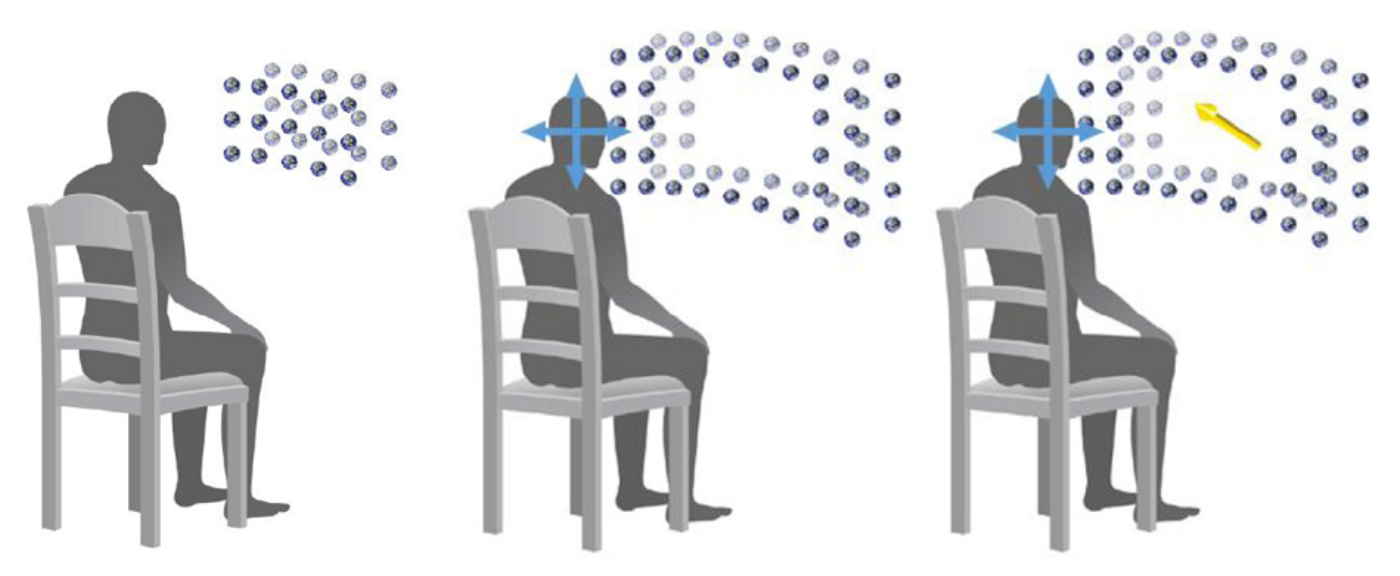
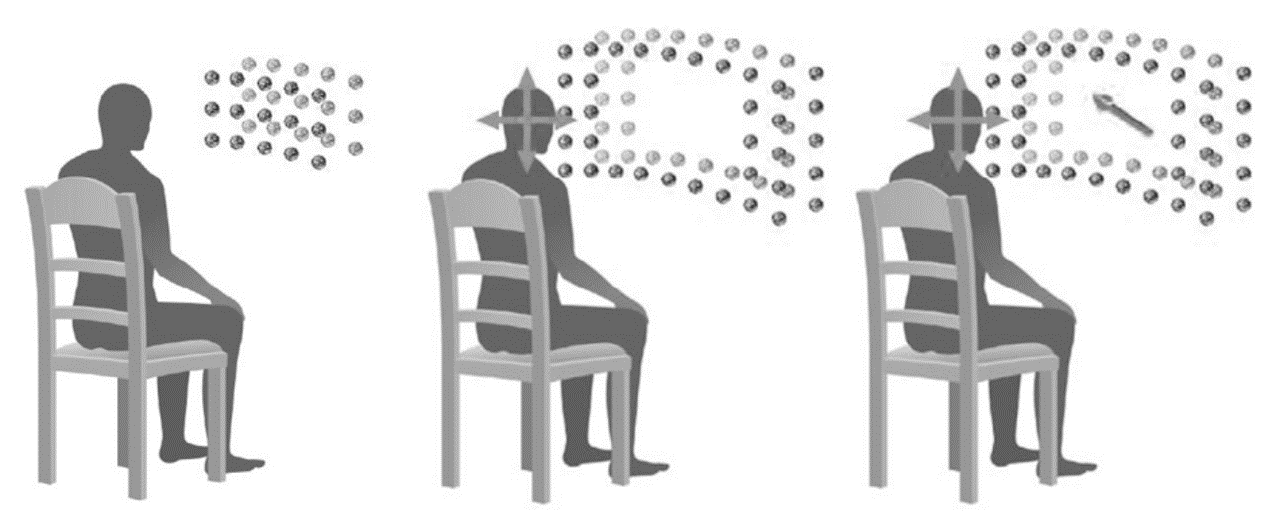
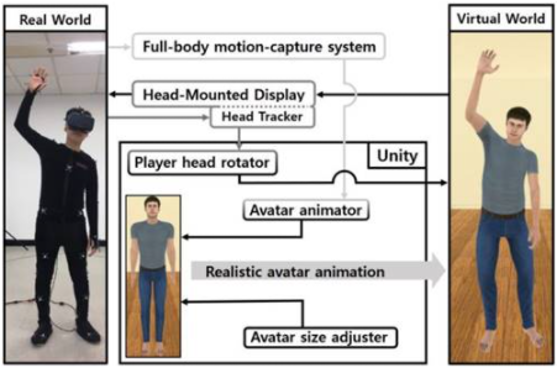
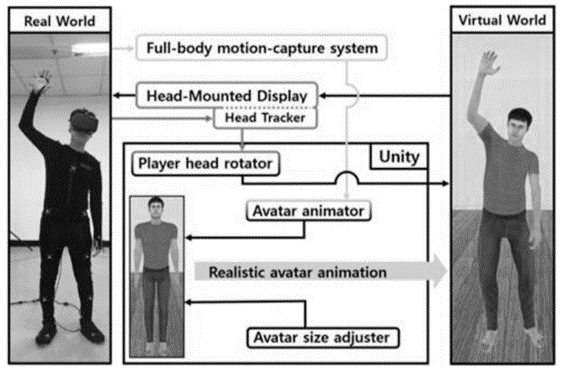
Research on Full-Body Ownership Illusion
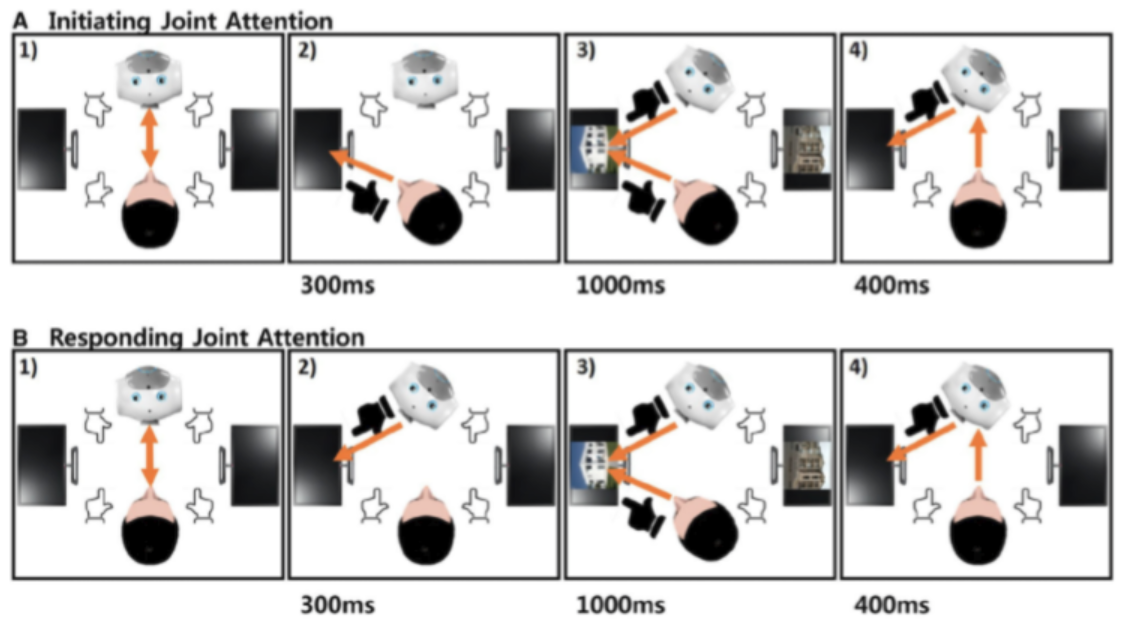
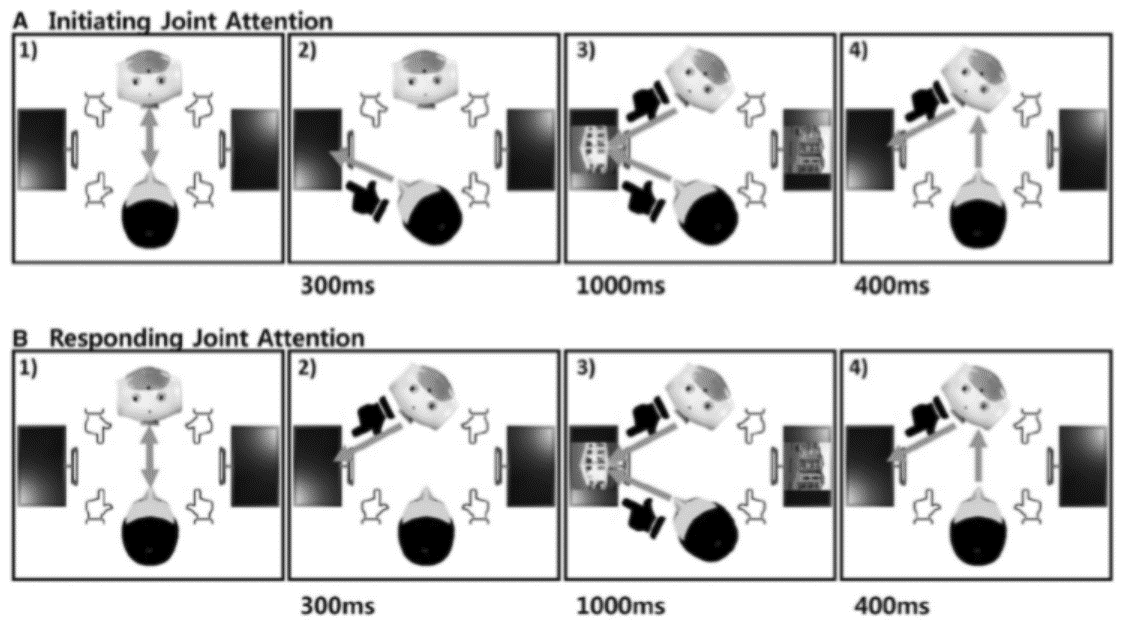
Research on Human-Robot Interaction
Research on Human Field of Regard and Field of View